Target Finder
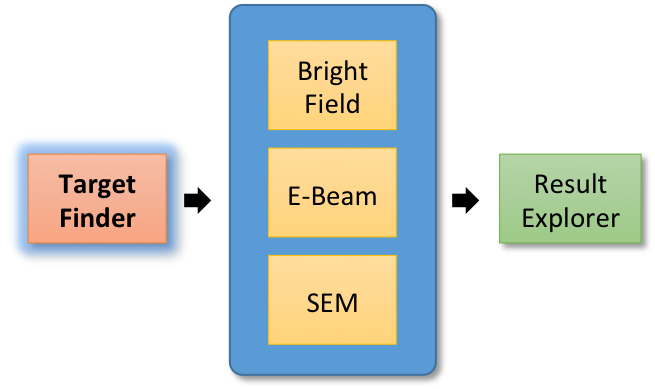
Bright Field inspection tools, E-Beam inspection tools, and SEM review tools need guidance in the form of rectangular care areas and point coordinates to allow these tools to optimize defect discovery.
Bright Field tools have the benefit of speed that allows them to inspect large areas of each die, but if these areas are not segmented into different threshold regions, these tools will suffer from at least two problems:
E-Beam tools have the benefit of high resolution, but are significantly slower. Large area scans are simply out of the question for production line monitoring.
SEM review tools are designed for point-to-point image capture and typically have a throughput of between 1000 and 3000 images per hour, which is still comparatively slow.
What is needed is a tool that can generate intelligent targets for these tools that take into account the need for broad defect discovery within a reasonable amount of time while minimizing nuisance defects. Target Finder addresses this need through comprehensive design-assisted features such as:
Pattern Segmentation
Optimized FOVs
Tools for discovering the more yield-critical areas of a design and driving inspection tools to those areas.
Bright Field tools have the benefit of speed that allows them to inspect large areas of each die, but if these areas are not segmented into different threshold regions, these tools will suffer from at least two problems:
- They will use a single threshold region that will significantly reduce their sensitivity to a broad spectrum of defect types.
- They will generate a large number of nuisance defects.
E-Beam tools have the benefit of high resolution, but are significantly slower. Large area scans are simply out of the question for production line monitoring.
SEM review tools are designed for point-to-point image capture and typically have a throughput of between 1000 and 3000 images per hour, which is still comparatively slow.
What is needed is a tool that can generate intelligent targets for these tools that take into account the need for broad defect discovery within a reasonable amount of time while minimizing nuisance defects. Target Finder addresses this need through comprehensive design-assisted features such as:
Pattern Segmentation
- Separate or segment the pattern in many different ways based on either geometric properties or specified patterns and their variations.
- Generate both macro and micro care areas using (a) exact match, (b) topologically similar match, (c) parametrically similar match, and other methods.
Optimized FOVs
- E-Beam tool efficiency requires us to fit the maximum number of targets or care areas into the smallest number of FOVs while adhering to constraints such as the amount of overlap between FOVs.
- Target Finder has been shown to generate E-Beam FOVs that result in 30% reduction in inspection time!
Tools for discovering the more yield-critical areas of a design and driving inspection tools to those areas.
Click for Larger
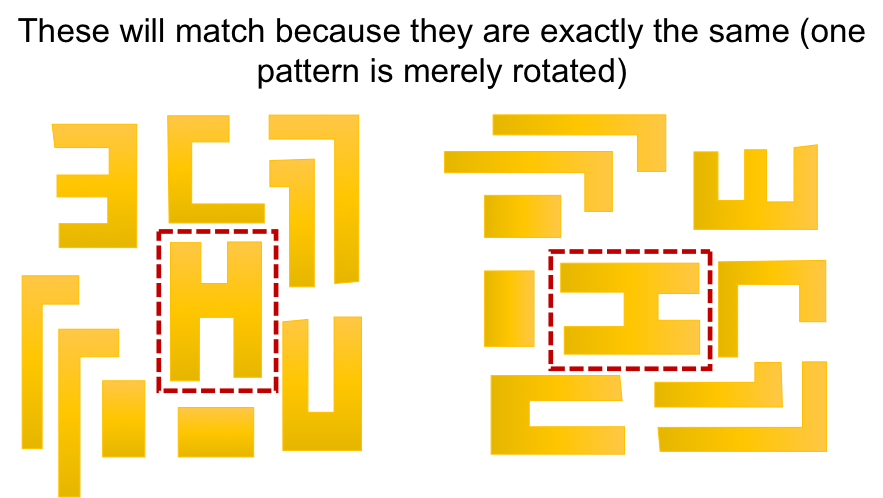
Exact Pattern Search
Need to find all occurrences of one or more patterns-of-interest (POI) on the die? POIs can come from OPC simulation, physical failure analysis (PFA), an existing library of suspicious patterns, background-based grouping of inspection defects, and other sources. Target Finder can locate all occurrences of these patterns regardless of their orientation (flip and rotation).
Click for Larger
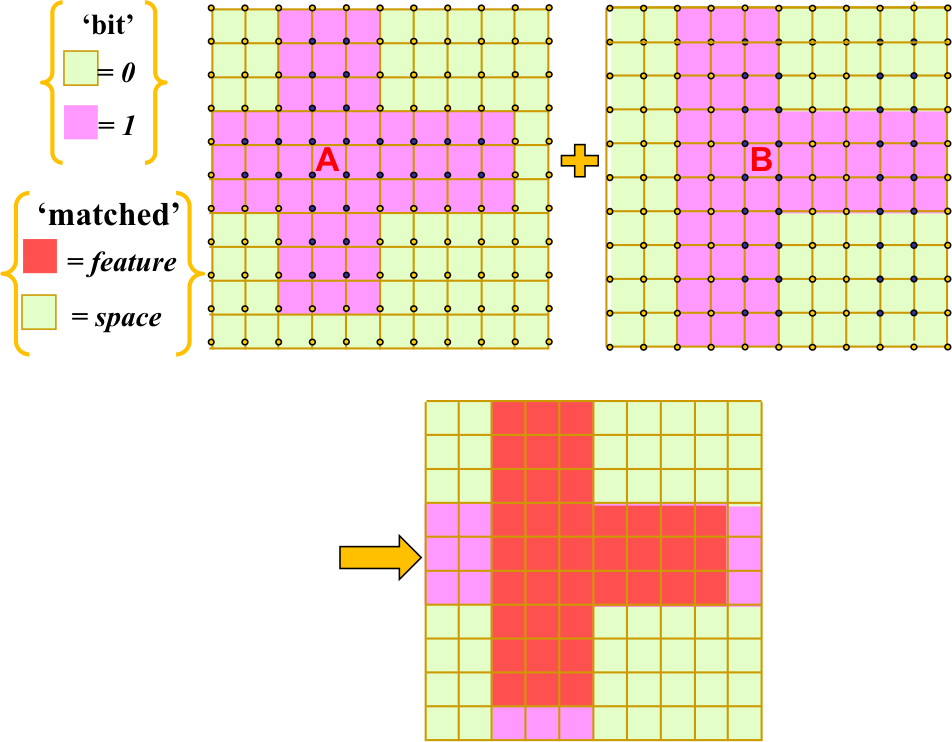
Pixel Based Similar Search
The calculations involved in similar search are more processor intensive than exact search. Additionally, what the user means by “similar” is open to some interpretation. For these reasons, Anchor provides several methods for performing similar search. Pixel Based Similar Search is designed for use cases that prioritize speed. Patterns are divided into user-defined grids, and a grid-by-grid comparison is performed. Similarity is computed as the percent of matching pixels.
Click for Larger
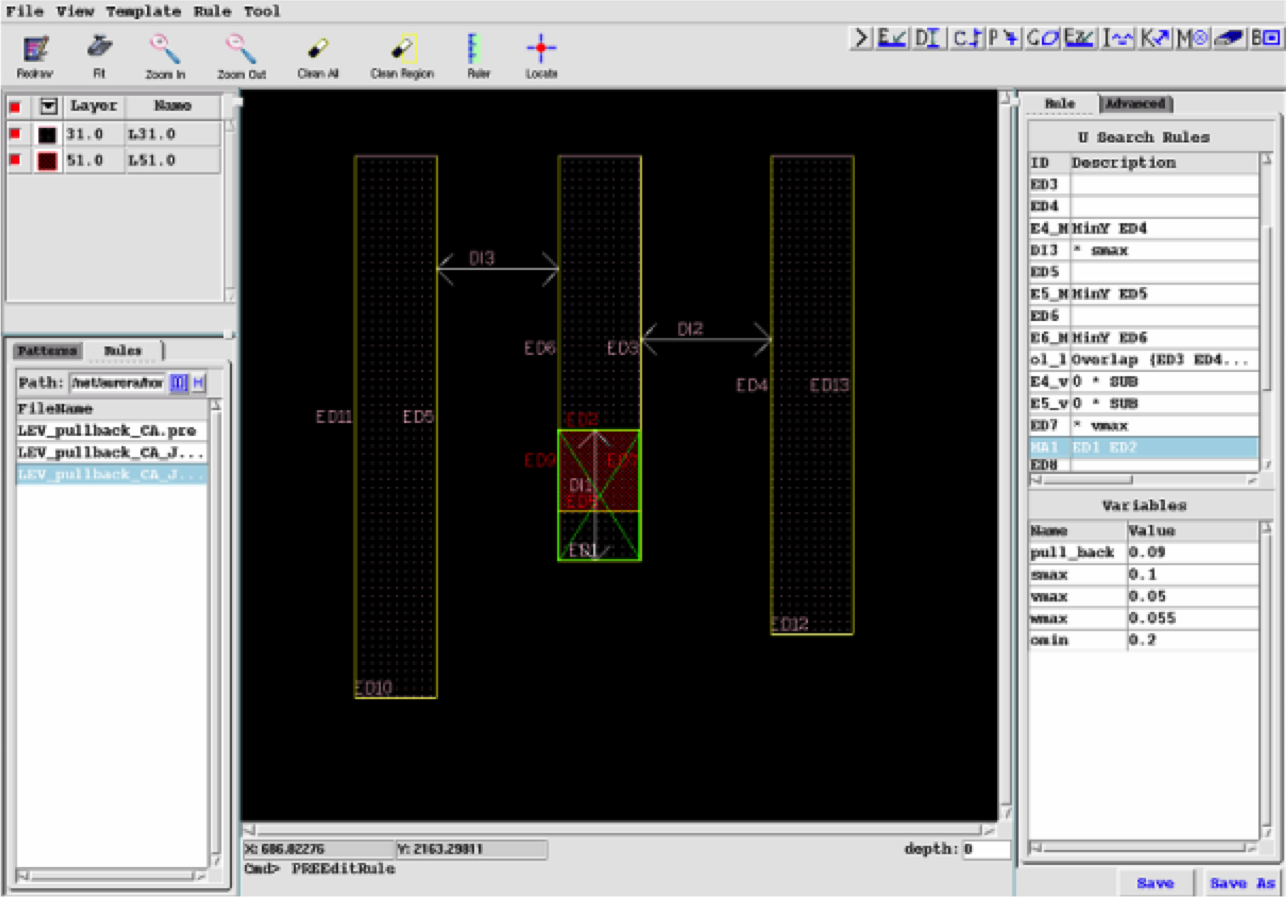
Parametric Search
Do you need to create a condition-based search where you are free to specify all of the constraints or parameters of the search? Want to look for 25nm square vias within a maximum of 90nm from the ends of thin lines that are no more than 32nm wide? Use the powerful Parametric Rule Editor (PRE) to build such rules graphically with point-and-click simplicity without resorting to scripting languages such as SVRF or PVL.
Click for Larger
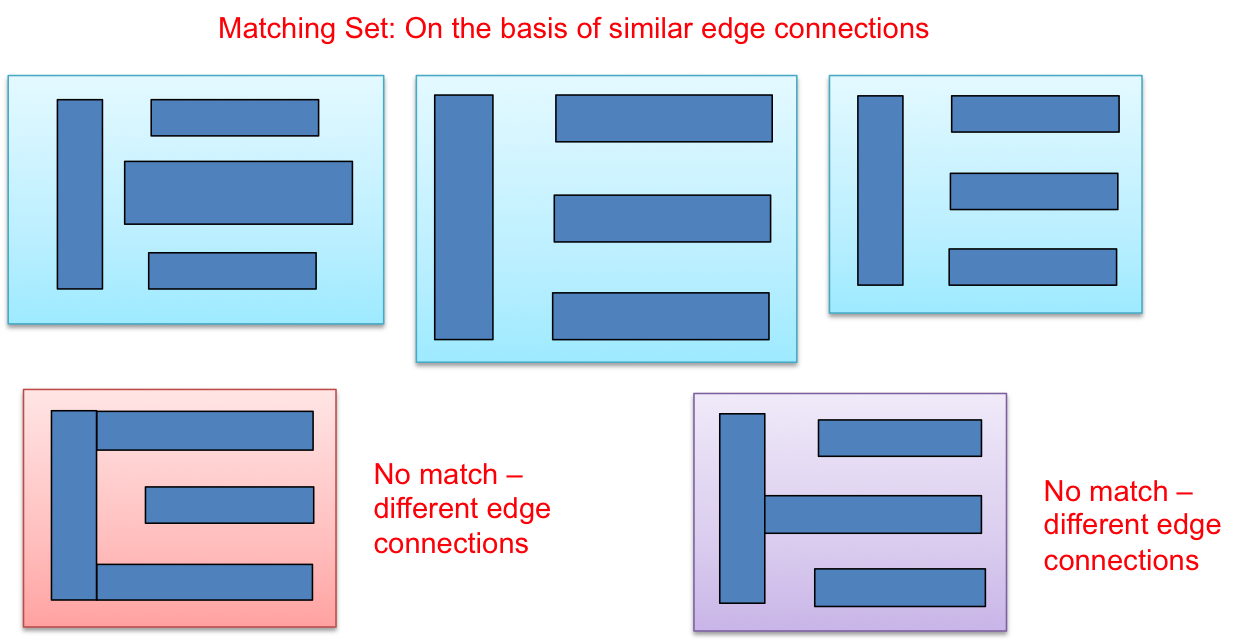
Topology Based Similar Search
Do you wish to base your search on the amount of common area, common perimeter, common edges, common vertices, common inner and outer corners, common line ends, common line widths, and other properties? Topology Based Similar Search provides a number of properties that can be combined to form a complex search sequence.
Click for Larger
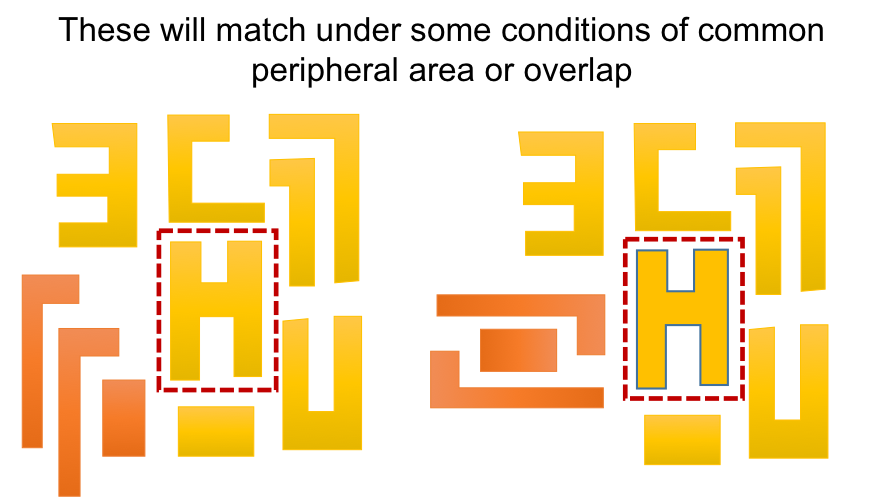
Center Exact Periphery Similar Search (CEPS)
This is an extension of Topology Based Similar Search in that exact search is performed in a specified center part of the pattern, while flexible topology-based similarity rules are applied to everything else.
Click for Larger
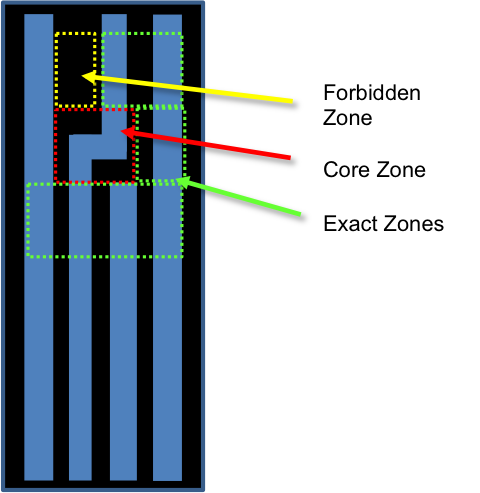
Zone Based Search
This is a hybrid search engine that combines exact and topologically similar searches into one. It allows the user to split the pattern into multiple zones and assign different search method to different zones. Do you need to perform exact search in one zone and similar search in another? Zone Based Search provides the solution!
Click for Larger
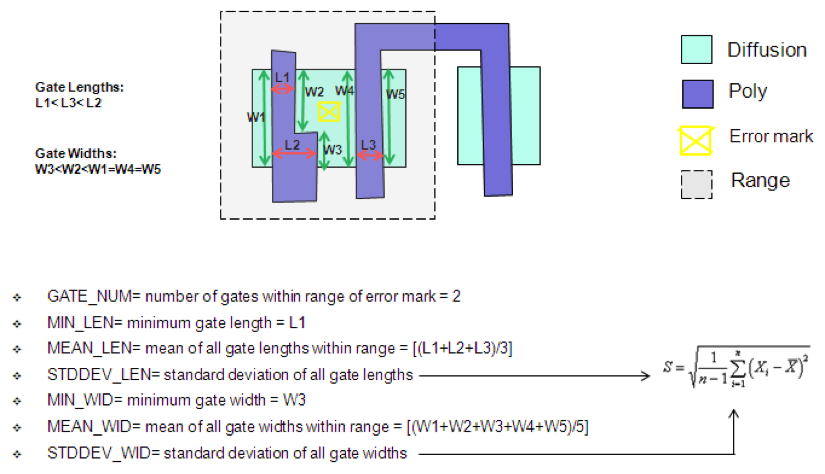
Signature Extraction
Whereas Pattern Search is based on shapes, Signature Extraction is based on geometric properties of the pattern. Properties such as Pattern Uniformity, Line End Count, Pattern Direction, Via Coverage, and many others can be calculated. Patterns can be grouped on the basis of a c common set of properties. Patterns can also be ranked in this manner. Comprehensive gate properties including Gate Length, Gate Shape, Number of Gates, Average Gate Length in a region, Minimum Gate Width, etc. can also be calculated and used for ranking, classification, and to obtain greater insight into the degree of variation present in the design.
Click for Larger
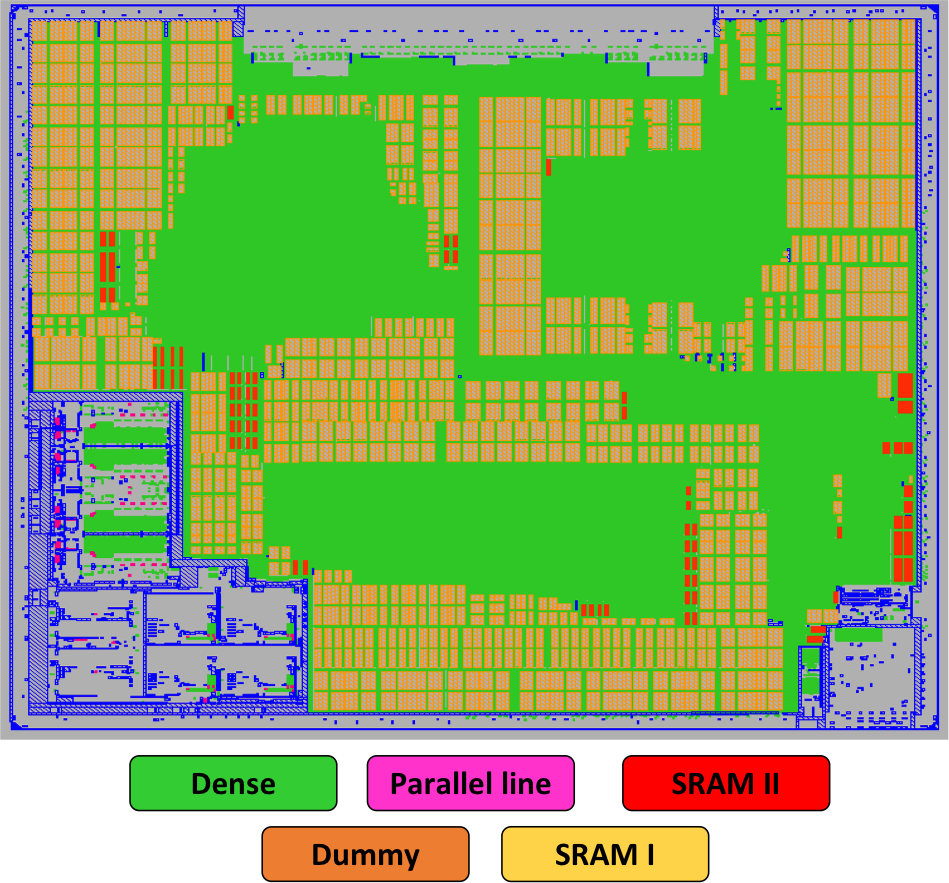
Critical Area Analysis (CAA) and Pattern Density Analysis
These features analyze the die for pattern density variations. CAA computes the probability that a defect of a given size will cause an open or a short (a killer defect) in a specific part of the die. Pattern Density Analysis will segment the device into regions that have similar density. These regions can be exported as care areas or displayed as a heat map. High density regions and transition density regions (where density abruptly changes) are often prioritized for inspection.
Main Benefits:
- Set of Linux functions that provide leading-edge pattern search and pattern signature extraction capabilities.
- Not only exact pattern search, but multiple methods for “similar pattern” search. Similar search is increasingly important as there are often slight variations of key patterns that would be too numerous to define individually with an exact search algorithm.
- Customers can embed these capabilities into their own automation workflows.
Main Features:
- Exact pattern search.
- Pixel based similar pattern search.
- Topology based similar pattern search.
- User-defined similar pattern search.
- Center-exact-periphery-similar pattern search.
- Zone based pattern search.
- Predefined pattern search (formerly known as YAM).
- Full chip critical area analysis (CAA).
- Full chip design density analysis.
- Design signature extraction.
Target Finder is an upgrade of DPE:
- Existing DPE customers may contact Anchor Semiconductor for details on obtaining this upgrade.
- DPE will continue to be supported with bug fixes (patches).

Technical Requirements
The minimum system requirements are listed below:
Memory and hard drive requirements can vary substantially from customer to customer. Customers who expect to store large quantities of images on the server should allocate appropriate hard drive capacity. Customers who expect to process large numbers of images should allocate additional physical memory. Anchor Semiconductor will help each customer with the appropriate sizing of their hardware.
- Linux 2.6 or later, 64-bit, x86 based processor.
- 16 or more physical cores.
- 128 GB or more physical memory.
- 2 TB or more available hard drive capacity.
Memory and hard drive requirements can vary substantially from customer to customer. Customers who expect to store large quantities of images on the server should allocate appropriate hard drive capacity. Customers who expect to process large numbers of images should allocate additional physical memory. Anchor Semiconductor will help each customer with the appropriate sizing of their hardware.